
Personal Narrative and Expertness
Visual Geomatic in AI | Space | Software Engineering | AI | Embedded
Susara S Thenuwara, M.sc in Artificial Intelligence, B.sc in Mathematics and Statistics.
My name is Susara S Thenuwara, and I was born in Sri Lanka. Currently, I am working as a researcher at the University of Tokyo in Japan. My passion for artificial intelligence developed during my tenure as a team leader at Kawdoco Inc. in Sri Lanka. This experience inspired me to pursue a Master's degree in Artificial Intelligence at the University of Moratuwa, Sri Lanka, where I gained a deep understanding of the theoretical and practical aspects of this field.
In addition to my Master's degree, I hold a Bachelor's degree in Science, with a focus on Mathematics and Statistics. These degrees, combined with my professional experience, have equipped me with the skills and knowledge necessary to excel in the field of artificial intelligence.
As a researcher, I am motivated by the potential of AI to transform our society and improve our lives. I am particularly interested in exploring how we can develop AI systems that are not only efficient and effective but also ethical and trustworthy. I believe that by leveraging the latest advancements in AI and adopting a responsible and ethical approach to its development and deployment, we can create a future in which AI serves the best interests of humanity.
In conclusion, my education and professional experience have prepared me well for my role as a researcher in the field of artificial intelligence, and I am eager to continue contributing to the advancement of this exciting and rapidly evolving field.
EXPERIENCE
Kawdoco Inc. as a Team Leader( www.kawdoco.com)
KAWDOCO, a partner company of Concepts NREC based in Sri Lanka, has served the industry for over 15 years as a leading AI solution, web based software development, and hosting company. We have the ability to focus on new technologies, including Artificial Intelligence, to enhance the quality and demand of our clients' image.
PROJECTS
A multi-agent based enhancement for multimodal biometric system at border control
In today’s world security is the most important aspect. Border criminals, frauds, unauthorized immigrants are burning issues in Sri Lanka within the last few years due to the lack of proper identification system i.e. duplicate passports, fake identity, etc. Therefore, the efficiency and accuracy of the traditional authentication system are not good enough to overcome this disaster. Furthermore, cryptanalysis and brute force attacks are dramatically strong with uncontrolled demanding of computational power. In fact, the efficiency and accuracy of the authentication are not enough to cater the future authentication systems by comparing traditional user authentication techniques. Therefore, Biometrics is the ideal solution for authentication as it has advantages over conventional systems.
Disaster Management Aerial Robot SOS mark recognize
Using OpenCV and machine learning, an image recognition model has been developed to detect the "SOS" mark in images. The primary objective of this model is to accurately identify the position of the "SOS" mark and extract its associated longitude and latitude coordinates. Once the coordinates have been extracted, they are promptly transmitted to the rescue center. This process enables the rescue center to quickly and effectively locate the individuals in distress, thus improving the response time for emergency situations.
The drone is able to actuate a remote critical valve autonomously with the aid of trajectory tracking using visual markers running ROS in Linux companion PC. LiDAR is used as a ground observing sensor the drone has a novel Passive gripper landing gear mechanism which was successfully tested. This is the final year project of the BSc degree
Detected image frame

-
PHP MYSQL LARAVAL online auction
This case study pertains to the development of a periodically updated content management system for an online auction platform. The system is designed using PHP and MYSQL, and employs VueJs as a data-driven web-based framework. The purpose of the content management system is to facilitate the management of various forms of content on the auction platform, such as product descriptions, bidding rules, and user-generated content. With the implementation of this system, the online auction platform can effectively manage and present its content in a structured and efficient manner, leading to improved user experience and increased user engagement.
-
Formula Student UK – 2018
Designed and produced a formula student level car for the FSUK 2018 competition representing University of Moratuwa. Worked as the chief electrical engineer and designed and manufactured a Solenoid, a custom dashboard, Electronic throttle (FMEA) and a DAQ with 2D localization using Kalman sensor fusion for GPS, inertial and Wheel speed sensor data. This project is sponsored by DIMO PLC.
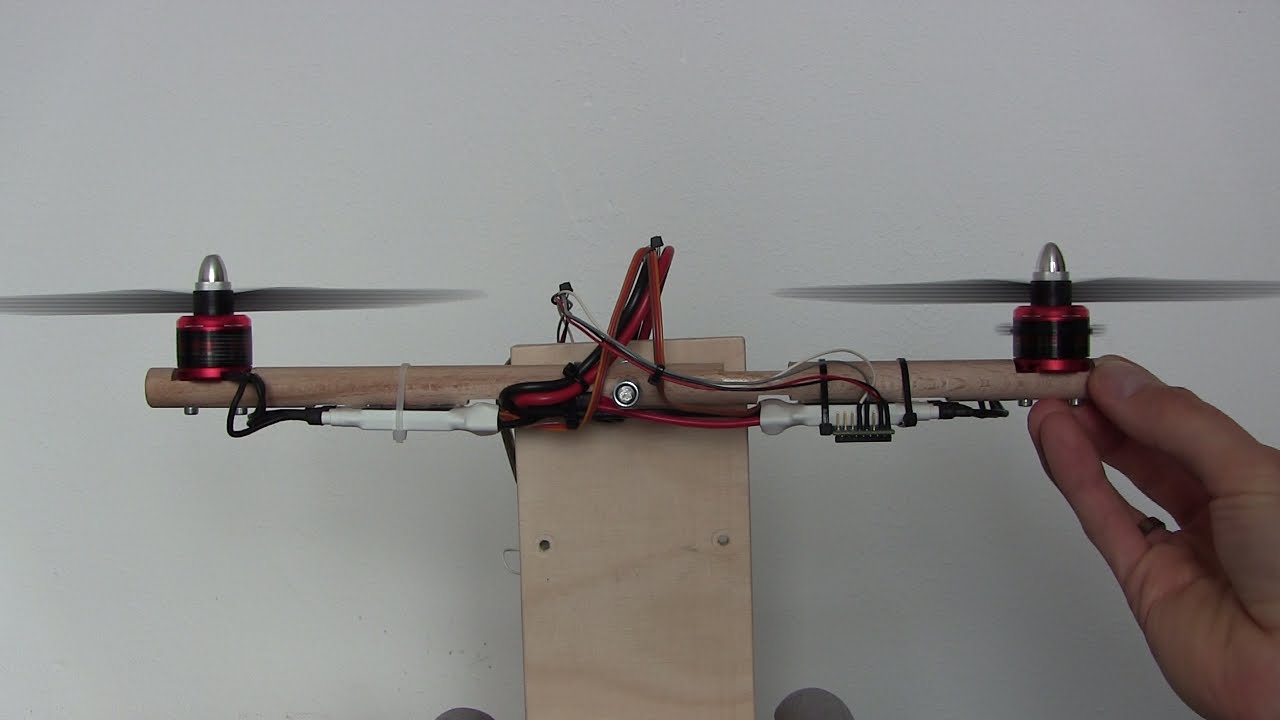
Autonomous drone with robotic arm and stabilizing by image processing technology.
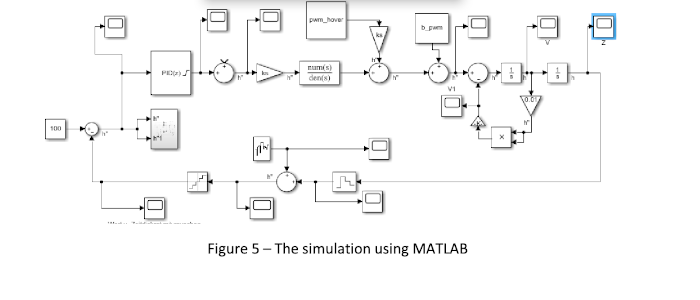
During the PBL in SIT with the supervision of Prof Chinthaka, I have done autonomous drone height control using PID tuning . This has been done by sensing height though LIDAR sensors and pass it through a programmed RasberyPi device. But fully autonomous need to control the horizontal plane as well.
Therefore, our next plan is to control the horizontal plane ( X and Y ) using image processing techniques. This can be done by RasberyPi camera or USB camera with image processing techniques. by taking images during the flight is not enough and we have to train the OpenCV module with python programming. As a beginning, we can take images from the pi camera using frequent flipping time period. Then comparing the images by OpenCV we could calculate the measurement of X and Y coordinate.
Control of aerial robot
Aerial robotics is evolving to include not only systems with sensing capabilities but also with the possibility to act on the environment (Manipulation). Multirotor systems use sensor fusion algorithms like EKF to combine different sensor data go generate robust localization data which is important to have precise control. Many researchers have proposed the addition of additional sensing methods like IR tags, Visual tags, external magnetometers, sonars, etc. to improve accuracy.
Drones usually come with linear PID controllers onboard on their flight controllers. But With the addition of manipulators, the consideration of the combined dynamics of both the systems has become critical. A nonlinear controller (VPIB) for the multirotor which takes into account the full dynamics of the arm has been presented. It is able to dampen the oscillations caused by the arm movement to a large extent, compared to a controller that does not consider the influence of the arm. Further, for the control of the arm admittance controllers, and impedance-based Cartesian methods have been proposed.
Kinematics of n- DOF Manipulator
When controlling the UAV systems, UAV and manipulator are considered as separate units where forces, torques, and couplings between them are considered as disturbances. to minimize these disturbances, both systems use separate controllers to reject the disturbance which occurs from the other system. So the inertia properties of the manipulator (with or without payload) are considerable with relative to the platform properties, then these systems could perform poorly. controlling the inertia properties of the system is really important.