




Multi-Agent approach to face recognition in border control and security in distributed network
SS Thenuwara and Prof. AS Karunananda
Border criminals and unauthorized immigrants are dramatically increasing within the last few years in globally due to the absence of proper authorization methods at the border locations. Usually, passenger controls done by trained immigration officers who compare the passport and the physical appearance at the border while some of the countries done by automated border control (ABC) systems. ABC is one of the applicable real-world applications of the biometric domain which commonly implements with fingerprint and face (multimodal) biometric authorization. However, selecting an appropriate classification method is a challenging task at the decision-making stage.
This paper proposes a novel architecture for multimodal biometric authorization engaged with the multi-agent system (MAS) to come up with the optimal solution by using the co-feature of MAS, such as coordination, corporation, and negotiation features. The experiment was done with four available multimodal datasets, namely, the National Institute of Standard Technology (NIST) multimodal, SDUMLA-HMT multimodal, BANCA and PRIVATE databases have been reported to demonstrate the efficiency of the proposed method. The experimental result delivers an excellent performance comparing with previous ABC systems at the authentication phase and computationally fast.
Master degree in Artificial Intelligence Thesis: Thesis Read more
Disaster Management Aerial Robot SOS mark recognize
Using OpenCV and machine learning, an image recognition model has been developed to detect the "SOS" mark in images. The primary objective of this model is to accurately identify the position of the "SOS" mark and extract its associated longitude and latitude coordinates. Once the coordinates have been extracted, they are promptly transmitted to the rescue center. This process enables the rescue center to quickly and effectively locate the individuals in distress, thus improving the response time for emergency situations.
The drone is able to actuate a remote critical valve autonomously with the aid of trajectory tracking using visual markers running ROS in Linux companion PC. LiDAR is used as a ground observing sensor the drone has a novel Passive gripper landing gear mechanism which was successfully tested. This is the final year project of the BSc degree
Detected image frame

-
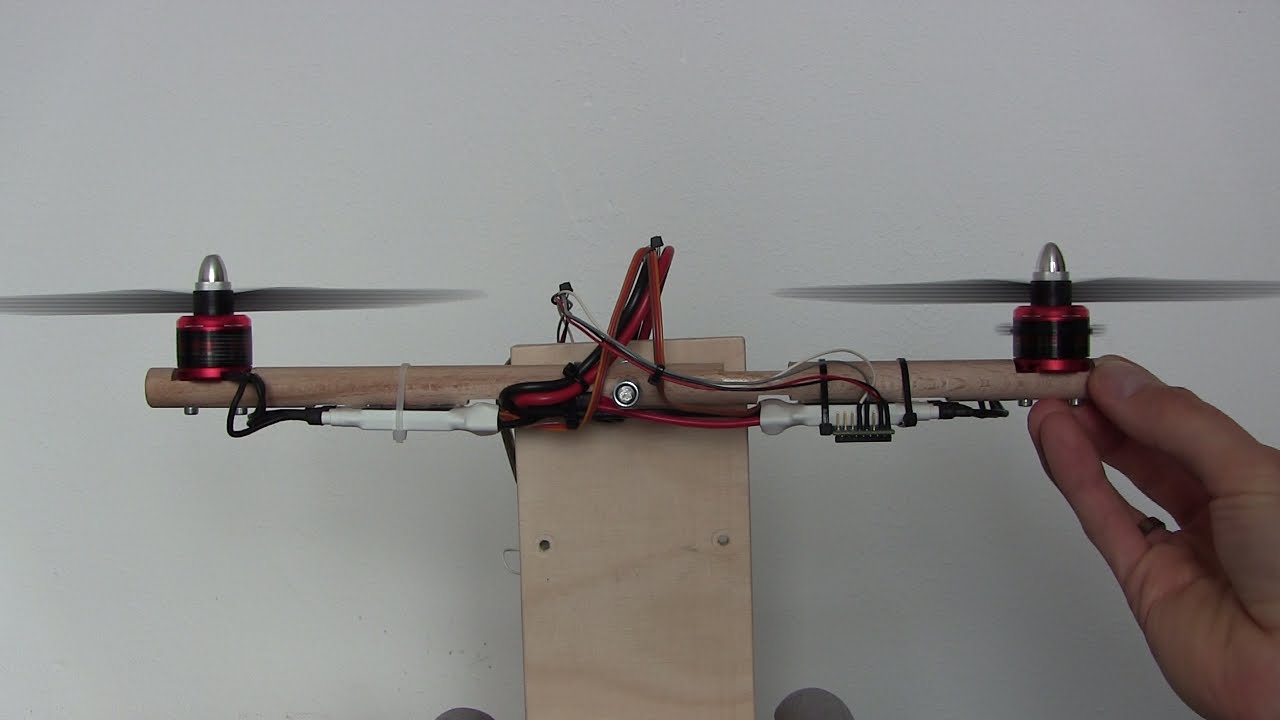
Disaster Management Aerial Robot
The field of aerial robotics has undergone a significant evolution in recent years, expanding beyond systems that merely possess sensing capabilities to those that can manipulate the environment. In order to achieve precise control, multirotor systems utilize sensor fusion algorithms such as EKF to combine various types of sensor data and generate accurate localization data. To further enhance the accuracy of these systems, researchers have proposed the integration of additional sensing methods such as IR tags, visual tags, external magnetometers, and sonars.
Traditionally, drones have been equipped with linear PID controllers onboard their flight controllers. However, with the addition of manipulators, it has become critical to consider the combined dynamics of both systems. As a solution, a nonlinear controller known as VPIB has been developed for multirotors, which takes into account the full dynamics of the arm. This controller is able to effectively dampen the oscillations caused by the movement of the arm, leading to more stable flight. Additionally, in order to control the arm, admittance controllers and impedance-based Cartesian methods have been proposed. By utilizing these advanced techniques, the control of aerial manipulators has been significantly improved, leading to more precise and efficient operation in a wide range of applications.
Remote Location Operation using Unmanned Vehicles
Major disaster happened in the recent past could have been prevented by a simple operation like opening a critical valve. Problems related to above issue are rarely addressed using Unmanned Vehicles. The existing solutions like mobile robots lack the ability to easily navigate to remote locations. A terrain mobile robot has a higher chance of failing to reach the destination. Properly equipped unmanned aerial robot could have executed such operation and save both human lives and property. First a literature review was performed to identify the hardware configuration, dynamics and load estimation and control side of existing valve turning robots. Using the data gathered the proposed system model was developed. The proposed design was then fabricated with the aid of software’s after simulating for intended loads. The drone platform is also improved with the intention of improving safety and stability.
The platform is tuned and improved hardware added. The novel design of passively actuated landing gear was thoroughly tested in a prepared test setup for landing and taking off on a pipe. Then the valve turning mechanism is tested with the actual gate valve. Then the complete assembly was assembled and flight tests are conducted for flight time and stability. Additionally computer vision based autonomous landing was implemented and research is conducted to improve the precision.

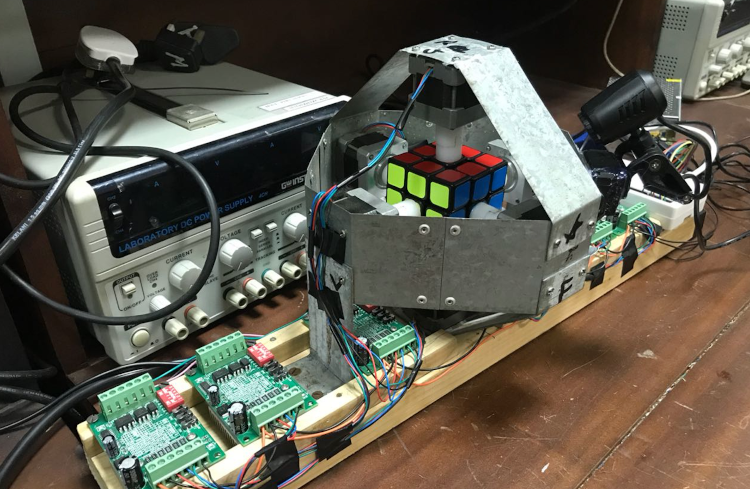
Solve the Rubik's Cube OpenCV
There are numerous approaches to solving the Rubik's Cube, each of which varies in difficulty level and suitability for different skill levels, from speedcubers to beginners, and even those attempting to solve the cube blindfolded. However, many individuals encounter difficulties when attempting to solve the cube beyond completing the first face and often require assistance.
In light of this common challenge, we have developed a robot capable of effortlessly solving the Rubik's Cube. Our robot implementation provides an efficient and effective solution to the Rubik's Cube, eliminating the frustrations and struggles that many individuals experience when attempting to solve it themselves.
Human–Robot Communication System for an Isolated Environment
We have showcased a service robot navigation system that uses the Message Queuing Telemetry Transport (MQTT) protocol for communication. This system updates the robot's real-time status for multiple users. Our office assistant robot (OABot) is made up of three components: a navigable structure, a mobile app, and a central control workstation. These three parts communicate with each other wirelessly. The OABot's mobile app uses voice recognition to interact with users through voice commands. The commands are processed inside the workstation, and the robot is given actions to follow accordingly. The robot can navigate through a room in real-time, using maps while also being able to identify people in certain locations using its digital camera. We have used RESTful and Mosquitto servers to enhance communication between humans and robots via WiFi. Multiple users can receive real-time updates on the robot's status via the MQTT protocol.
Formula Student UK – 2018
Designed and produced a formula student level car for the FSUK 2018 competition representing University of Moratuwa. Worked as the chief electrical engineer and designed and manufactured a Solenoid, a custom dashboard, Electronic throttle (FMEA) and a DAQ with 2D localization using Kalman sensor fusion for GPS, inertial and Wheel speed sensor data. This project is sponsored by DIMO PLC.